


| 所属类型: | 伺服电机 |
| 品 牌: | 松下 |
| 产 地: | 珠海 |
| 状 态: | 在产 |
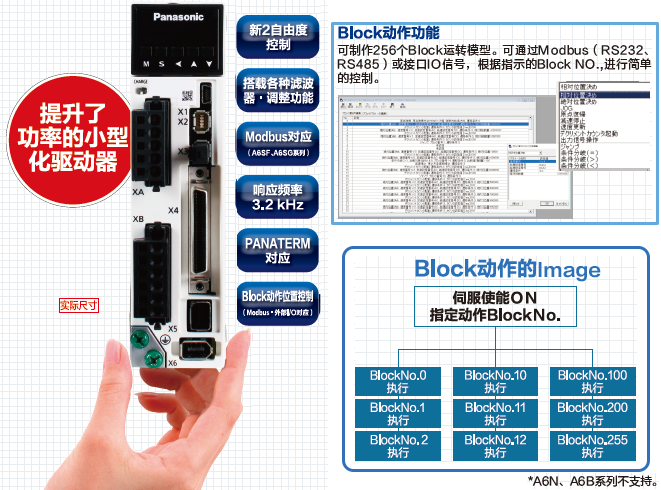
| 特 点: | 更快速、更智能、使用更简单的升级。提升了功率小型化驱动器 |
更快速、更智能、使用更简单的升级。提升了功率小型化驱动器。
|
 |  |  |  |  |  ※1 ※1 |  ※2 ※2 |  |
| ※1 | A6SF系列 |
|---|---|
| ※2 | A6SE、A6SG系列 |
 |
| 用CPU等网络设备的系统更新甚至媲美了当社对应制作的环保型梯度下降法,达成目标了较高速的相应性。与此同时,可自功消除基于振功模式引发的微振功模式、基于机制的晃荡引发的振功模式等,达成目标了高高精准度的定位系统。 | 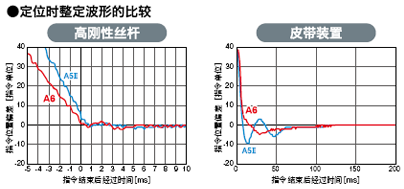 |
 |
| 顺利通过新提升了的是和增加收益,急剧度节约了懂得調整事件。可全自动更改・懂得調整自适于陷波滤波器性能及很多增加收益。 ※1 与本机构过去护肤品A5Ⅱ家庭相比之下较。 |  |
 |
实现响应频率3.2 kHz。通过实现与以前机种相比139 %的提升※1,达到更高速动作,提高生产性。 |  |
| 提出主轴电机、控制器的人类寿命和平衡装置的劣化界限的警示。 |
| 会按照类件的载货量不同等合理的惯量也会异动,本效果可会自动添加最适用的增益值表。借助此方式 ,厂家系统的运作电动车续航到增强阶段。 | 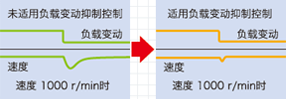 |
| 为较低设备类磨蹭的决定而加快为了响应性的性能。常见赔偿费一些 运行的零漂扭矩为偏载货量赔偿费,可会按照运行的中心点场景人物风格的调整在动磨蹭赔偿费,会按照控制台命令进程变换场景人物风格的调整在粘度磨蹭赔偿费。 |
| 研制了借助装置对口支援pc软件会自动设置好制振滤波器的作用。制振滤波器基于重设指令放入清掉一直有的振动模式,概率,可幅度减少立即停止时轴的摇动。 制振滤波器互相使用的时,由一直以来机种的两个变动为3个(2放任度重设模式,行之更有效时由一直以来机种的个变动为两个),行之更有效的设置好概率也扩展了0.5 Hz~300.0 Hz。 |  |
| 支持简约的自動控制陷波滤波器的职能。不需去冗杂的震动幅度率法测定便可自動验测震动幅度,并控制陷波滤波器。 借助该陷波滤波器,可大幅度减少因机诫装置行成的异声和震动幅度,进行高速公路出错舞蹈动作。 A6宗族商品支持了6个陷波滤波器。每次的控制率为50 Hz~5000 Hz,且都要调整的深度。(进来6个可自動控制) | 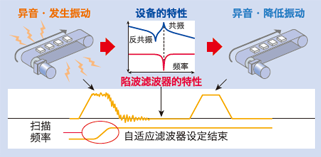 |
| 除经常的增加收益控制开启外,追加了第三段增加收益控制开启功能表。可在止住・正常的工作时的增加收益控制中设计止住气隙时的增加收益控制。抱歉增强止住气隙时的增加收益控制,可节约精准定位准确时间同时下降振动模式。 | 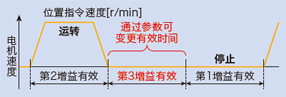 |
| 可以通过后边板或PC使参数值恢复原状到出厂检验报告制定。 |
可通过接口的切换输入功能切换第1/第2惯量比。可在
有/无负载等惯量有2段变化时,提高响应性。 |
| 可经由规格不同调整代用的10个发送,6个工作输出数据信息。(发送数据信息都要参与常开,常闭的选定)。经由采用怎么安装测试运行平台「PANATERM」,快速设置更进一步更好。 |
| 可用途于简单的工作压力・拉力调控,无传压力传感器器开始初始化等事列中。 |
AA6SF系列可对应全闭环控制,实现指令输入8 Mpps,反馈输出4 Mpps的高分辨率、高速运转。可对应高性能定位分辨率指令(脉冲列指令的情况下)。 |  |
| 使用控制在基本参数,在步进驱动器线束使能OFF时,方形向/负定位驱使明令禁止时,电源开关无电可用时,异样关闭程序时,可选装择使步进驱动器线束电机的的U、V、W的卷线烧坏的动态信息汽车制动系统动做。 请跟据机械厂自动化设备的规范规格型号,挑选控制在动做时序。 |
| 拨出去主机供电时,为避免由突入瞬时感应电流引发的的主机供电配线用旋钮误動作,原带了突入瞬时感应电流抑止阻值。 |
使较大惯量的负载停止时或上下轴驱动时,通过再生电阻消耗由伺服电机返回给伺服驱动器能量的功能。 |
| 系列 | 位置 控制 | Block 动作 | 速度 控制 | 内部 速度 指令 | 转矩 控制 | 全闭环 控制 | 脉冲 | 模拟 | Modbus | 外部 位移 传感器 | RS232 RS485 | 安全 连接器 | 电源电压 (V) | 出力 (W) | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 模拟/ 脉冲列 输入/ Modbus 通信 | 旋转 电机 | A6SE |  | | | | AC100/ AC200 | 50 ~ 2200 | ||||||||
| A6SG | | | | | | | AC100/ AC200 | 50 ~ 2200 | ||||||||
| A6SF | | | | | | | | | | | | | AC100 AC200 AC400 | 50 ~ 2200 | ||
| 项目 | 功能 | |||
|---|---|---|---|---|
| 输入电源 | 100 V | 主电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |
| 控制电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | |||
| 200 V | 主电路电源 | A型~ D型 | 单相/三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |
| E型~ H型 | 三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 控制电路电源 | A型~ D型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||
| E型~ H型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| 使用环境条件 | 温度 | 使用温度 0 ℃~55 ℃(无冻结) 保存温度 -20 ℃~65 ℃(最高温度保证:80 ℃ 72小时 但是无结露※1) | ||
| 湿度 | 使用、保存时都需保持在20 %~85 % RH 以下 (无结露※1) | |||
| 海拔 | 海抜1000 m 以下 | |||
| 振动 | 5.88 m/s2 以下,10 Hz ~60 Hz | |||
| 控制方式 | IGBT PWM 方式 正弦波驱动 | |||
| 编码器反馈 | 23 bit(8388608 分辨率)7线串行绝对式编码器 ※使用增量式系统( 不使用多圈数据) 的情况下,使用时无需连接绝对式编码器用电池。将参数Pr0.15 设置为出厂设置“1”。 | |||
| 外部位移传感器反馈 | A/B 相·原点信号差分输入、串行通信 串行通信位移传感器对应制造商: Mitutoyo 、Heidenhain、Renishaw、Magnescale、Nidec-sankyo、Fagor Automation | |||
| I/O 连接器 | 控制信号 | 输入 | 通用输入10 个 根据参数选择通用输入功能 | |
| 输出 | 通用输出6 个 根据参数选择通用输出功能 | |||
| 模拟信号 | 输入 | 输入3个(16bitA/D输入1个、12bitA/D输入2个) | ||
| 输出 | 输出2个(模拟监视器输出2个) | |||
| 脉冲信号 | 输入 | 输入2个( 光电耦合器输入、长线接收器输入) 通过光电耦合器输入,可对应长线驱动器I/F·开路集电极I/F 通过长线接收器输入,可对应长线驱动器I/F | ||
| 输出 | 输出4 个( 长线驱动输出3 个、开路集电极输出1 个) 编码器反馈脉冲(A·B·Z 相) 或者外部位移传感器脉冲(EXA· EXB·EXZ 相) 通过长线驱动器输出 Z 相或者 EXZ 相脉冲也有开路集电极输出。 | |||
| 通信功能 | USB | 可连接电脑等进行参数设定以及状态监视等。 | ||
| RS232 | 可与上位控制器进行1 :1 通信。 | |||
| RS485 | 可与上位控制器进行1 :n 通信(Modbus 对应)。 | |||
| 安全功能 | 为对应功能安全的端子 | |||
| 前面板 | ①按键 5 个 ②LED 6 位 | |||
| 回生 | A 型, B 型, G 型,H 型:无内置再生电阻( 只可外置) C 型〜F 型:内置再生电阻( 可外置) | |||
| 动态制动器 | A 型〜G 型:内置 H 型:仅外置 | |||
| 控制模式 | ①位置控制 ②速度控制 ③转矩控制 ④位置/速度控制 ⑤位置/转矩控制 ⑥速度/转矩控制 ⑦全闭环控制 7 个模式通过参数进行切换 | |||
| 项目 | 功能 | ||
|---|---|---|---|
| 控制输入 | ①伺服使能开启输入 ②报警清除输入 ③增益切换输入 ④正方向驱动禁止输入 ⑤负方向驱动禁止输入 ⑥强制报警输入 ⑦惯量比切换输入 | ||
| 控制输出 | ①伺服报警输出 ②伺服准备输出 ③外部制动器解除信号 ④速度到达输出 ⑤转矩限制中信号输出 ⑥零速检出信号 ⑦警告输出 ⑧报警清除属性输出 ⑨伺服使能开启状态输出 | ||
| 位置控制 | 控制输入 | ①偏差计数器清除 ②指令脉冲禁止输入 ③指令分倍频切换 ④制振控制切换> | |
| 控制输出 | ①定位完成 ②有无位置指令输出 | ||
| 脉冲 输入 | 最大指令脉冲频率 | 500 kpps(使用光电耦合器输入时) 8 Mpps(使用长线接收器输入、4 倍频时) | |
| 输入脉冲信号形态 | 差动输入。通过参数可进行选择。(①正方向/负方向 ②A相/B相 ③指令/方向) | ||
| 指令脉冲分倍频 (电子齿轮比设置) | 指令脉冲频率×电子齿轮比 作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 | ||
| 平滑滤波器 | 针对指令输入,可选择一次延迟滤波器或者FIR 型滤波器。 | ||
| 模拟输入 | 转矩限制指令输入 | 可单独进行各方向的转矩限制。 | |
| 转矩前馈输入 | 可通过模拟电压输入转矩前馈。 | ||
| 2 自由度控制/ 制振控 | 可使用 | ||
| 负载变动抑制控制 | 可使用 | ||
| Block 动作 | 可选择Modbus(RS232、RS485) 或者I/O。 | ||
| 速度控制 | 控制输入 | ①内部指令速度选择 ②零速箝位 ③速度指令符号输入 ④控制模式切换 | |
| 控制输出 | ①速度一致输出 ②有无速度指令输出 | ||
| 模拟输入 | 速度指令输入 | 通过模拟电压可进行速度指令输入。 位移传感器设定及指令极性根据参数而定。(6 V/额定转速 标准出厂设置) | |
| 转矩限制指令输入 | 可单独进行各方向的转矩限制。 | ||
| 转矩前馈输入 | 可通过模拟电压输入转矩前馈。 | ||
| 内部速度指令 | 可根据控制输入切换8 档内部速度。 | ||
| 软启动/断电功能 | 0~10 s/1000 r/min 可单独设定加速、减速,也可设定S形加减速。 | ||
| 零速箝位 | 可通过速度锁定输入将速度锁定为0。 | ||
| 2自由度控制 | 可使用 | ||
| 转矩控制 | 控制输入 | ①零速箝位 ②转矩指令符号输入 ③控制模式切换 | |
| 控制输出 | ①速度一致输出 ②速度限制中输出 | ||
| 模拟输入 | 转矩指令输入 | 可通过模拟电压输入转矩指令。 位移传感器设定及指令极性根据参数而定。(3 V/额定转矩 标准出厂设定) | |
| 速度限制功能 | 可根据参数设定速度限制值。 | ||
| 全闭环 控制 | 控制输入 | ①偏差计数器清零 ②指令脉冲禁止输入 ③指令分倍频切换 ④制振控制切换 ⑤转矩限制切换 | |
| 控制输出 | ①定位完成 ②位置指令有无输出 | ||
| 脉冲 输入 | 最大指令脉冲频率 | 500 kpps(光电耦合器输入) 8 Mpps(使用器线接收器输入、4 倍频时) | |
| 输入脉冲列形态 | 差动输入。可根据参数进行选择。(①正/负 ② A相/B相 ③指令/方向) | ||
| 指令脉冲分倍频 (电子齿轮比的设置) | 指令脉冲频率×电子齿轮比作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 | ||
| 平滑滤波器 | 针对指令输入,可选择一次延迟滤波器或者FIR 型滤波器。 | ||
| 模拟输入 | 转矩限制指令输入 | 可单独进行正/ 负方向的转矩限制。 | |
| 转矩前馈输入 | 可通过模拟电压输入转矩前馈。 | ||
| 外部位移传感器分倍频设置范围 | 1/40倍 ~ 1280倍 可在分子=1~223、分母=1~223 的范围中任意设定编码器反馈脉冲(分子) 与外部位移传感器脉冲(分母) 的比,请在以上范围内使用。 | ||
| 2自由度控制/ 制振控制 | 可使用 | ||
| 负载变动抑 | 可使用 | ||
| Block 动作 | 可选择Modbus(RS232、RS485) 或者I/O。 | ||
| 共通 | 自动调整 | 可根据来自上位的动作指令以及安装调试软件“PANATERM”的动作指令下的电机驱动状态,实时识别负载惯性并自动设置相应刚性的增益。 | |
| 反馈脉冲的分频功能 | 可任意设定脉冲数。(编码器反馈脉冲数为最大值) | ||
| 防护等级 | 硬件错误 | 过电压、电压不足、过速度、超载、过热、过电流、编码器异常等。 | |
| 软件错误 | 位置偏差过大、指令脉冲分频、EEPROM异常等。 | ||
| 报警数据跟踪功能 | 可浏览报警履历。 | ||
| 项目 | 功能 | ||||
|---|---|---|---|---|---|
| 输入电源 | 100 V | 主电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | ||
| 控制电路电源 | 单相 100 V +10 %-15 % ~120 V +10 %-15 % 50 Hz / 60 Hz | ||||
| 200 V | 主电路电源 | A型~D型 | 单相/三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||
| E型, F型 | 三相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||||
| 控制电路电源 | A型~D型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | |||
| E型, F型 | 单相 200 V +10 %-15 % ~240 V +10 %-15 % 50 Hz / 60 Hz | ||||
| 使用环境条件 | 温度 | 使用温度 0 ℃~55 ℃(无结露) 保存温度 -20 ℃~65 ℃(最高温度保证:80 ℃ 72小时 无结露※1) | |||
| 湿度 | 使用、保存时都需保持在20 %~85 % RH 以下(无结露※1) | ||||
| 海拔 | 海抜1000 m 以下 | ||||
| 振动 | 5.88 m/s2 以下,10 Hz ~60 Hz | ||||
| 控制方式 | IGBT PWM 方式 正弦波驱动 | ||||
| 编码器反馈脉冲 | 23 bit(8388608 分辨率)7线串行绝对式编码器 ※由于仅需对应增量式系统,使用时无需连接绝对式编码器用电池。将参数Pr0.15设置为“1”。 | ||||
| I/O连接器 | 控制信号 | 输入 | 通用输入10 个 根据参数选择通用输入功能 | ||
| 输出 | 通用输出6 个 根据参数选择通用输入功能 | ||||
| 模拟信号 | 输入 | 无 | |||
| 输出 | 输出2 个 (模拟监视器输出2 个) | ||||
| 脉冲信号 | 输入 | 输入2 个 (光电耦合器输入、线接收器输入) | |||
| 输出 | 输出4 个 (长线驱动输出3 个、集电极电路输出1 个) | ||||
| 通信功能 | USB | 与电脑等的连接 | |||
| RS232 | 1:1 通信 | ※RS232、RS485 不适用于A6 SE 系列。 | |||
| RS485 | 1:1 通信 (最大31 轴) | ||||
| 前面板 | ①按键 5 个 ②LED 6 位 | ||||
| 再生 | A 型, B 型:无内置再生电阻 (只有外置) C 型〜F 型:内置再生电阻 (可外置) | ||||
| 动态制动器 | A 型〜F 型:内置 | ||||
| 控制模式 | ①位置控制 ②内部速度控制 ③位置/内部速度控制 | ||||
| 项目 | 功能 | ||
|---|---|---|---|
| 控制输入 | ①伺服使能开启输入 ②报警清除输入 ③增益切换输入 ④正方向驱动禁止输入 ⑤负方向驱动禁止输入 ⑥强制报警输入 ⑦惯量切换输入 | ||
| 控制输出 | ①伺服报警输出 ②伺服准备输出 ③外部制动器解除信号 ④速度到达输出 ⑤转矩限制中信号输出 ⑥零速检出信号 ⑦警告输出 ⑧报警清除属性输出 ⑨伺服使能开启状态输出 | ||
| 位置 控制 | 控制输入 | ①偏差计数器清除 ②指令脉冲禁止输入 ③指令分倍频切换 ④制振控制切换 ⑤转矩限制切换 ⑥制振模式切换 | |
| 控制输出 | ①定位完成 ②位置指令有无输出 | ||
| 脉冲 输入 | 最大指令脉冲频率 | 500 kpps (使用光电耦合器时) 8 Mpps (驱动长线接收器输入时) | |
| 输入脉冲信号形态 | 差动输入。根据参数可进行选择。(①正方向/负方向 ②A相/B相 ③指令/方向) | ||
| 指令脉冲分倍频 (电子齿轮比设置) | 指令脉冲频率×电子齿轮比作为位置指令输入进行处理。但是,请在电子齿轮比为1/1000 倍〜8000 倍的情况下使用。 | ||
| 平滑滤波器 | 针对指令输入,可选择一次延迟滤波器或者FIR 型滤波器。 | ||
| 制振控制 | 可使用 | ||
| 2自由度控制 | 可使用 | ||
| 负载变动抑制控制 | 可使用 | ||
| Block 动作 | 通过I/O 控制 | ||
| 内部速度控制 | 控制输入 | ①内部指令速度选择 ②零速锁定 ③速度指令符号输入 ④控制模式切换 | |
| 控制输出 | ①速度一致输出 ②有无速度指令输出 | ||
| 内部速度指令 | 根据控制输入可切换8 档内部速度。 | ||
| 软启动/断电功能 | 0~10 s/1000 r/min 可单独设定加速、减速,也可设定S形加减速。 | ||
| 零速锁定 | 速可通过速度锁定输入将速度锁定为0。 | ||
| 2自由度控制 | 可使用 | ||
| 共通 | 自动调整 | 可根据来自上位的动作指令以及安装调试软件“PANATERM”的动作指令下的电机驱动状态,实时识别负载惯性并自动设置相应刚性的增益。 | |
| 反馈脉冲的分频功能 | 任意设定脉冲数。(编码器的脉冲数为最大值) | ||
| 防护 等级 | 硬件错误 | 过电压、电压不足、过速度、超载、过热、过电流、编码器异常等。 | |
| 软件错误 | 位置偏差过大、指令脉冲分频、EEPROM异常等。 | ||
| 报警数据跟踪功能 | 可浏览报警履历。 | ||




